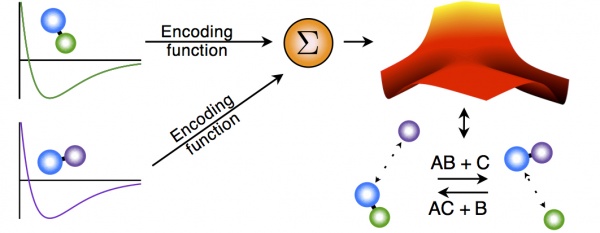
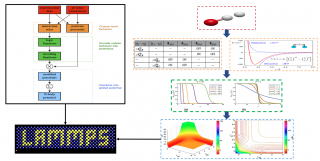
Our research focuses on the operator-theoretic approach to dynamical systems and applications in control, energy infrastructure and soft robotics. The application of Koopman operator methodology in this context enables data-driven learning of complex dynamical systems occurring in these applications. The framework that arise is versatile and can incorporate stochastic and hybrid elements of systems. Particular topics of interest include:
-
Developing methods for geometric analysis of state space in deterministic, non-smooth and stochastic systems,
-
Development of control-theoretic methodology in the Koopman framework,
-
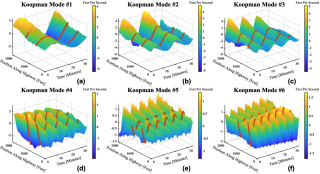
Development of numerical methods for characterization of spectral properties of the Koopman operator,
-
Development of Koopman operator theory for partial differential equations, and
-
Application to modeling soft robotics systems